B21M
(under construction. more about this project later)
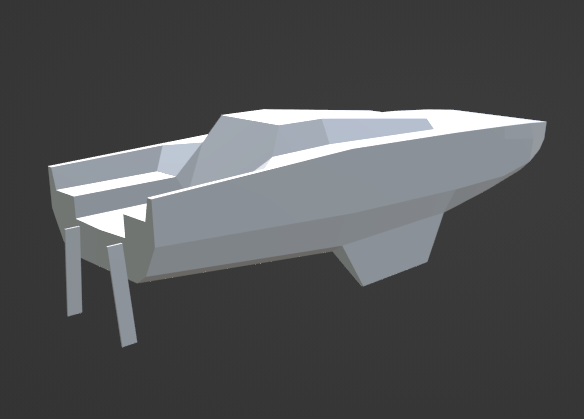
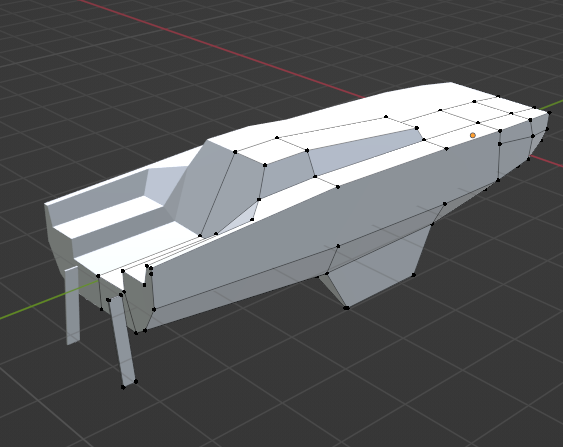
Marine Navigation/Autopilot¶
For a marine navigation-system I am developing a GPS-tracker and autopilot system. The goal is to have low power computer with sensors for pitch, jaw, direction (compass) and GPS, that can control an electric motor. The Beagleboard already has some useful sensors, the inputs to connect GPS devices, and it can run on a 7.4 battery.
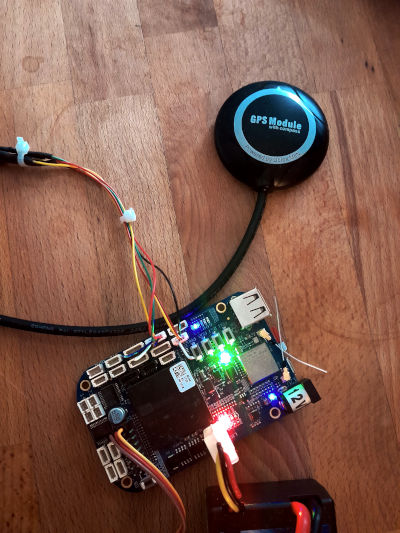
Hardware:¶
- Beaglebone Blue 2x
- Ublox M8N GPS Module
- Zeee LiPo4 batttery 7.4V
- micro servo (for testing)
- linear actuator (for moving the tiller)
- xbox wireless controller
- 5000W BLDC motor (48V)
Software:¶
- Debian Linux
- Python
- ZeroMQ
- Open Seamaps
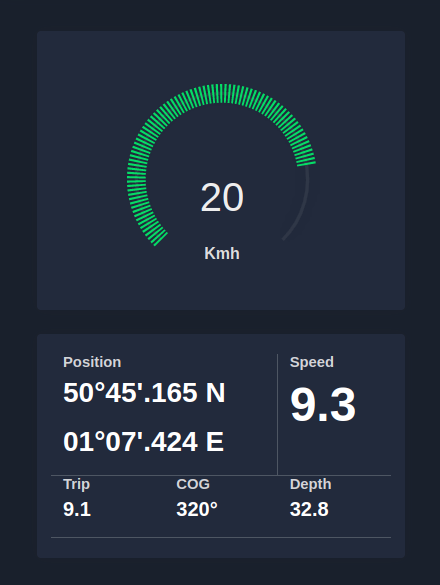
GPS¶
The M8N GPS/GNSS module receives GPS, Galileo, GLONASS, BeiDou.
ZMQ¶
The standard used for connecting marine sensors and display units within ships and boats is often Nmea2000. This involves some special connectors, lots of cables and an old messaging protocol. Instead, I will use wireless communication (either using a router as accesspoint, or using a second Beagleboard Blue in AP mode). The messageprotocol uses ZeroMQ to communicate and GPS and gyro data in JSON format.